

自主移動機器人
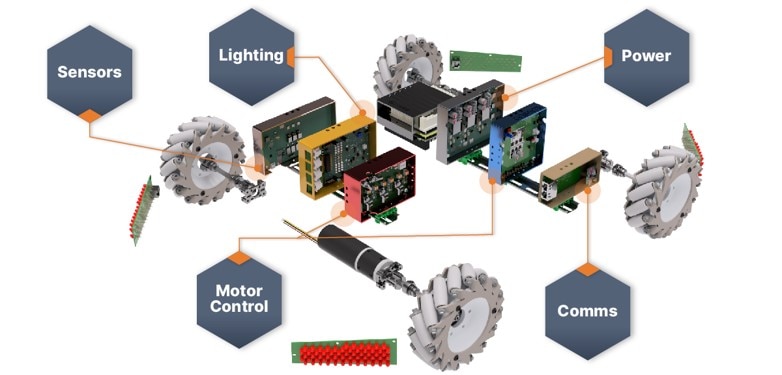
onsemi 自主移動機器人概念是採用 onsemi 高效創新解決方案設計的綜合型機器人解決方案。藉由結合 onsemi 不同的智慧和動力解決方案,此概念可用於設計各種類型的機器人、協作機器人、電動工具和自動導引車。
- BLDC 馬達控制套件
- 電池充電和電源轉換
- 影像感測器和光達解決方案
- 連接解決方案
- LED 照明
- 工業協作機器人與機器人
- 倉庫機器人
- 送貨機器人
- 電動工具
- 農業機器人
- 割草機
- 自主導引車

自主移動機器人影片 -

2024 Embedded World 專訪 -

技術深聊:機器人與實體 AI -
- BLDC 馬達控制解決方案
- 感測解決方案
- 電源解決方案
- 照明解決方案
- 通訊解決方案
BLDC 馬達控制解決方案
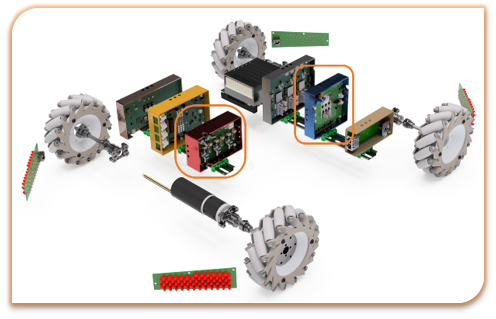
首先,我們提供 BLDC 馬達控制解決方案,且有三種不同的平台選擇。第一種是我們的 ecoSpin 整合式馬達開發晶片。這是用於馬達 BLDC 控制的完全整合式解決方案。它具有整合式靴帶二極體,以及感測放大器、閘極驅動器、微控制器。提供韌體。
第二種解決方案是 Xilinx 的系統,使用離散式閘極驅動器和 MOSFET。它可用於需要更多馬達控制級別運算能力的平台。
最後,我們提供基於電動工具的解決方案。
精選產品




感測解決方案
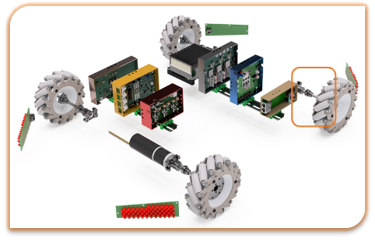
自主機器人必須看著前進方向,因此需要影像感測器和攝影機模組。我們的示範使用 E-con USB 攝影機模組。它使用全域快門影像感測器,非常適合自主機器人。全域快門感測器可同時儲存每個影像的像素資料。這些類型的感測器不會出現滾動快門感測器中常見的動作假影,因此非常適合在工廠或倉庫地板上移動時使用。滾動快門感測器比全域快門感測器具有更高的動態範圍,因此在光照條件存在極大差異的情況下,可以更有效地運作。然而,對於在工廠運作的自主機器人來說,照明條件適合使用全域快門感測器。AR0234CS 影像感測器支援每秒 60 幀的 Full HD 影像。
具有可移動手臂的自主機器人使用伺服馬達來控制手臂、抓具的位置。這需要準確的位置回報。此外,如果自主機器人斷電、然後再次啟動,則非常需要知道手臂的正確位置。絕對位置感測器可以隨時確定手臂的位置。光學感測器可以做到這一點,但它們需要大量外部元件,而且對溫度變化很敏感。Onsemi 是汽車市場高可靠性客製化位置感測器的知名供應商。根據這項經驗,我們開發了使用 NCS32100 感測器控制器的雙感應式位置感測器解決方案。我稍後將在本簡報中詳細介紹此產品。
精選產品






電源解決方案
現在,讓我們來看看自主機器人的電源。當然,它是由電池供電的,但電池在某個時候需要充電。自主機器人非常聰明,可以自己前往充電點。外部機械手臂將電源線連接到自主機器人,為機器人充電。
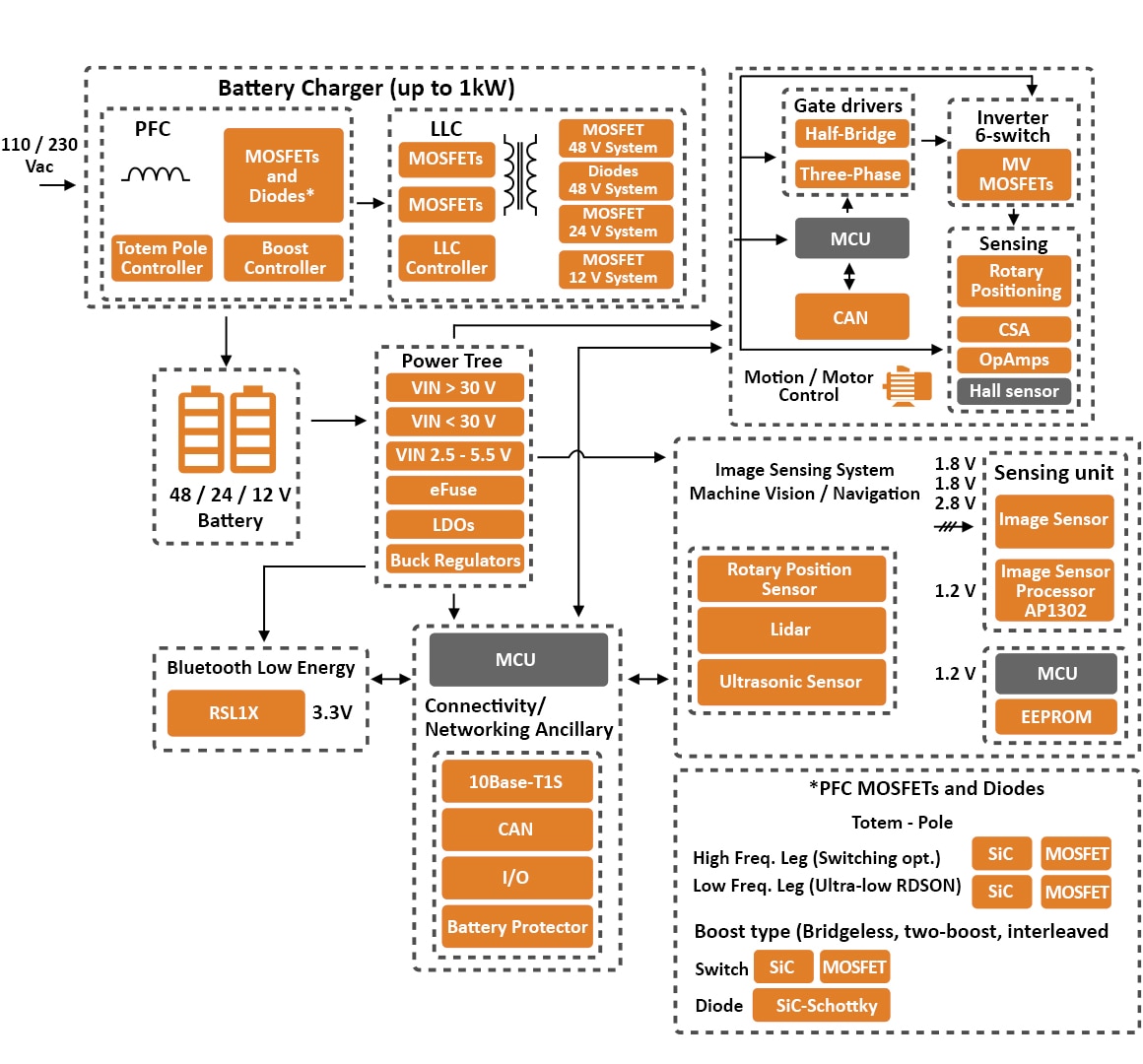
用於自主機器人的 600 W AC 電源輸入電池充電器由三個部分組成:PFC 級、隔離式 LLC 轉換器、降壓轉換器。PFC 級是使用 NCP1632 PFC 控制器的雙交錯式 PFC 級。這樣能確保從 AC 線路汲取的電力具有良好的功率因數、較低的總諧波失真。LLC 級使用具有中點分接半橋拓撲的 LLC 拓撲,將 PFC 級的輸出 (例如 400 VDC) 轉換為 48 V DC 輸出電壓。目前設計使用 NCP1399,較新的設計建議使用更先進的 NCP13994。使用兩個 NCP4305D 同步整流控制器控制的兩個 FDMS86202ET 中電壓 MOSFET,對輸出進行同步整流。
電池充電配置包括恆定電流充電模式,可產生寬廣的工作電壓範圍。LLC 級的電壓轉換比或增益工作範圍很窄,因此它們在恆定電流模式下表現不佳。自主機器人充電器具有使用 FAN65008 的第三個降壓級,可以在非常寬的電壓轉換比範圍內運作,因此可以輕鬆提供電池充電所需的電流和電壓曲線。
精選產品

 Driver General Purpose Power MOSFET 10-DFN (4x4)")

 291W (Tc) Through Hole TO-247-3")





, 102A (Tc) 3.3W (Ta), 187W (Tc) Surface Mount 8-PQFN (5x6)")

照明解決方案
我們的自主機器人解決方案配備 LED 燈,向人類和其他機器人告知其存在。額外的 LED 燈用於發出訊號。Onsemi 是一家為汽車、工業車輛市場提供車頭燈、車尾燈、日間行車燈、號誌燈解決方案的知名供應商。我們從這個廣泛的產品組合中,選擇了兩種產品用於我們的自主機器人。
NCV7685 汽車尾部 LED 燈解決方案是驅動器 + 整合式 MOSFET 解決方案,使用簡單。有 12 個並列 60 mA 通道,透過 I2C 介面進行 PWM 控制。如果設計人員想要在沒有外部微控制器的情況下操作 LED 驅動器,他們可以對特定的 OTP 暫存器進行預先編程來設定工作週期。LED 驅動器具有故障診斷功能,可由微控制器讀回,以偵測特定錯誤,例如設定電流的引腳發生短路、I2C 通訊中的錯誤、高溫警告、熱關斷、開路負載情況。微控制器可以使用這些資訊來支援必要的修正措施,例如將錯誤傳回監測本地自主機器人的中央主機控制器。
精選產品

NCV7685DQR2G
查看詳情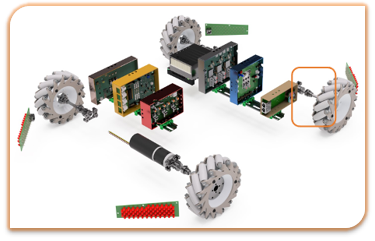
通訊解決方案
傳統上,機器人供應商多選用汽車用 CAN 通訊協定作為機器人不同節點之間的有線通訊方式,包括 BLDC、照明、處理器與部分感測器等。CAN 已問世數十年,透過多點或菊鏈拓撲,搭配輕量、低成本的非屏蔽式雙絞線 (UTP),可實現 2 Mbps 至 5 Mbps 的節點間通訊。同時,隨著機器人逐漸具備更多自主性,或需與人類更緊密協作,其智慧程度也必須相應提升。機器人的智慧化仰賴更多處理能力與感測器的整合,包括光達、影像感測器、超音波、雷達、感應式定位等。影像感測器及光達推動了更多通往處理器節點的點對點 (p2p) 通訊連結,並需支援如 Gigabit 乙太網路等更高速的數據傳輸率。CAN 的一大缺點是,由於通訊協定不同,乙太網路與 CAN 之間需要透過閘道器轉換。
2019 年,Ethernet Alliance 正式制定 IEEE 802.3cg 標準,也就是 10BASE-T1S,作為「全乙太網路」架構下的 CAN 替代方案。有了 10BASE-T1S,就能以相同的兩條線材 (SPE:單對乙太網路) 實現比 CAN 快 2 至 3 倍的通訊速度,並透過 onsemi 的 NCN26010 或 NCN26000 控制器,省去額外閘道器的成本與重量。











