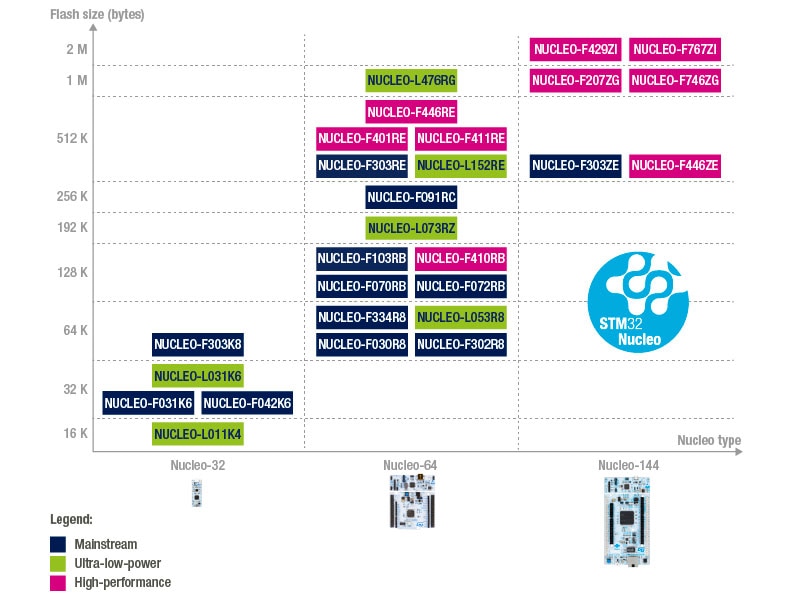
製造商零件編號 NUCLEO-F042K6
NUCLEO-32 STM32F042K6 EVAL BRD
STMicroelectronics
Debugging via printf (or Serial.print or, as I suggested in a previous article, snprintf) can be an extremely useful tool for seeing, quickly, what your system is doing and to zero in on the parts of your system that are, or could soon be, causing errors. This tool is not without its downsides, however, and you may have found in your experimentation with printf that calling it more than a few times significantly slows down your program. This challenge limits the times you can use printf/snprintf IRL, despite how useful it can be. In this article (and in Part 2), we'll do our best to make printf/snprintf blisteringly fast so that you can use it to your heart’s content!
How much time does printf take really? To answer that, I'm going to execute the code below on a Nucleo-F042K6 running at 8 MHz.
HAL_GPIO_WritePin(A7_GPIO_Port, A7_Pin, GPIO_PIN_SET);
printf("%s", "Whazzup, Nate Jones?!\n");
HAL_GPIO_WritePin(A7_GPIO_Port, A7_Pin, GPIO_PIN_RESET);
That whole process (which included sending out 22 characters over UART) took about 6.8 ms, as can be seen on the screenshot of my logic analyzer below. (About 145 μs of that is printf formatting our message, and 6.67 ms is the actual UART transmission.)

6.8 ms to send out each one of our messages is a long time!! No wonder our programs were slowing down so much. And, actually, it gets worse: that time was just for a message that had no variable arguments. Here are a few more tests that show how long printf takes if we pass in integer or floating-point numbers (with the same number of total characters).




As it turns out, printf runs non-deterministically, meaning that it will take a variable amount of time to execute based on the number and type of variable arguments it's passed. It even depends on the specific value of those arguments sometimes, as certain values convert to strings more quickly than others! (Indeed, the length of time it took to send out the messages above, especially for the floating-point numbers, was highly variable from message to message.)
Maybe you actually haven’t noticed the effect of printf on your system as its running, though. That’s great! If all your system is doing is blinking an LED at 1 Hz, you can send out books of printf messages in between each LED blink. Eventually, though, as you add more printf statements and as your system does more and better things, you may realize that it does matter. If your actual system is only idle for 10 ms out of every 1 second, then all of your print statements during that 1-second operating interval have to fit within that 10 ms budget, or things will start to lag. Ultimately, this is a problem of task scheduling, i.e., ensuring that the tasks in your system, even with all their various print statements, can all complete before their respective deadlines. We need printf to run fast enough for our system to function, but not necessarily any faster. (For a more thorough discussion of task scheduling, see here.)
Based on the timing diagrams above, we can group our solutions to the problem of making printf/snprintf faster into three broad categories:
There are a number of different things to do in each category to meet our objectives. Some are harder than others, though, so look out for the following symbols to help you pick the right one for your project and skill level:

To begin, we’ll look at a few (mostly) easy optimizations we can make based on slightly changing the default settings for our project.

An easy way to speed up our whole system is to simply run the clock faster. The STM32F042K6 I’m using in these examples can run as high as 48 Mhz, six times faster than the value that was used above (the default value for new STM32 projects for this Nucleo board)! At that clock speed, we can reduce the time it takes to format and send our message with one integer from 7.03 ms to only 5.96 ms!

This significantly reduced the time it took for printf to run (from 365 μs down to 68 μs), though the time it's taking to actually transmit our message is still dominating the execution time for the moment.
By a similar token, you could also move your project to a more powerful processor. This is possibly not the most helpful piece of advice, but it does bear mentioning. A faster microcontroller would not only reduce the time it took to format our debug messages, but it would potentially allow our system to get more work done while each of our debug messages is being transmitted.

"Baud rate" is synonymous with "symbol rate" (which is how fast a communication channel can send individual symbols). In our case, that's the same as its "bit rate". If a UART channel, for instance, is set to a baud rate of 115200, it can send 115,200 bits per second. Since each byte we send has a total of 10 bits (which includes the start and stop bits), we can send 11,520 bytes or characters per second across that UART link.
However, this likely isn't the maximum rate at which we can send data over UART! Many microcontrollers support baud rates as high as several megabaud, and although, at some point, you'll need to worry about transmitting data so fast that it gets garbled in transmission, your UART link is likely short enough that setting it that high won't cause any problems (some experimentation required). If your UART is set to 38400 (the default value for new projects in STM32CubeIDE), increasing the baud rate to 3 Mbaud (the maximum that STM32CubeIDE will let me set it for my Nucleo-F042K6) is more than a seventy-eightfold increase in speed, meaning you can send nearly 30 times as many debug messages as before! (If your UART is still set to the Arduino default of 9600, this is over a three hundredfold increase in speed!)
Increasing the baud rate of our sample system from 38400 to 3M reduces the amount of time it takes to send our “one integer” message from 5.96 ms to only 303 μs! That’s over 23 times faster than our initial baseline!


At this point, I had the suspicion that the STM32 HAL was slowing me down a little bit. (HALs can be very convenient, but this convenience usually comes at the cost of lots of code.) I switched to using the STM32 LL (“low-level”) library, which necessitated the following change to PUTCHAR_PROTOTYPE:
PUTCHAR_PROTOTYPE
{ while(!LL_USART_IsActiveFlag_TXE(USART2));
LL_USART_TransmitData8(USART2, ch);
return ch;
}
The function HAL_UART_Transmit() was 85 lines of code, whereas LL_USART_TransmitData8() is 1 line of code, so it runs much more quickly. Switching to the low-level library reduced our message time from 303 μs to 140 μs.

The next set of optimizations doesn’t directly affect the time it takes to format or transmit our messages; instead, they focus on reducing the number and complexity of our messages to allow printf/snprintf to naturally complete more quickly. In the last tip, we may even just find that we do not need to optimize printf/snprintf at all!

Instead of sending out individual values each time they occur in your system, you can consider sending out just a summary piece of data at a much lower frequency. For example:
This would add a little bit of processing that needed to be done on your microcontroller, but it could drastically reduce the number of messages you need to send.

We learned above that printf/snprintf take longer when they are given more (and more complex) arguments, so consider reducing those to reduce the time spent formatting your debug messages. Find ways to:
For example:

Every byte counts, so make those debug messages as terse as you can! Replacing:
I bring you dire news, dear human, that the internal temperature, in Celsius, of the warp core has exceeded normal operating values and is now, even as I send you this message, rapidly approaching 39.4523 degrees!! Pray, take action, post haste!
with:
WARNING: Warp core 39.4523 deg C
saves 213 characters, which is 213 fewer characters that printf/snprintf has to process before the message is sent out.
Okay, so your debug messages probably aren't that verbose (or as fun), but the point stands. Even replacing WARNING: Warp core 39.4523 deg C with [W] Core 39C saves 20 characters and is nearly one-third the length of the former message. (Let's be honest: there's probably only one core [no need to specify "warp"] and you probably don't need that much precision in the temperature.)
On my Nucleo-F042K6, changing Value of counter: %03d\n to just Countr:%03d\n (saving 11 characters) reduced the formatting time by 6 μs, or roughly half a microsecond per ASCII character.


Why get dirty with the messiness of reality when you can run your whole system inside your computer instead?? With a simulation, the amount of time printf/snprintf takes is less important, since
To do this, you would replace all of the hardware-specific code on your embedded system with versions that could run on your computer instead. It's like setting up a "mock" for a unit test: you're simply writing code that is pretending to act like an external device, but it gets to do that in any way it wants as long as it behaves like the real thing. For example:
Here's what this might look like for a system that was reading accelerometer values and setting the speed of a motor based on those values (a full description of what these videos are doing and how to program them yourself can be found here). In the first example, I am getting user inputs (or generating random numbers) to simulate my sensors and just writing motor values to the terminal. In the second example, I am doing the same thing in a much fancier way by getting and displaying values in a GUI.
You might find that you don't actually need printf to run faster, as long as it can run in a simulation that faithfully shows you what your program would do on a real device.
With only a few easy modifications, we were able to make significant improvements in how fast printf/snprintf ran!

1: Time to send a 22-character message with one integer
By just clicking a few buttons in our setup and changing one line of code, we made printf more than 50 times faster!
Additionally, we identified a few ways you can use printf/snprintf less overall, further reducing the amount of time your processor is being used to send out messages.
If you’ve made it this far, thanks for reading and happy hacking!