使用支援藍牙 5.1 的平台實作精確的資產追蹤和室內定位 - 第 1 篇
資料提供者:DigiKey 北美編輯群
2019-07-25
編者說明:此系列文章分為兩篇,第 1 篇介紹藍牙 5.1 的測向能力。這是低功耗藍牙韌體的附加功能,可讓設計人員開發到達角 (AoA) 和出發角 (AoD) 型定位應用,例如資產追蹤和室內定位系統 (IPS)。接著,還會介紹適合執行新功能的平台。第 2 篇則說明如何開發藍牙 5.1 測向型應用,以及如何開始使用這些平台。
物流公司希望透過即時追蹤資產來改善供應鏈效率,企業希望透過監看員工和顧客的動態來提升生產力。在這兩種趨勢下,對定位服務的需求便日漸增加。即使藍牙的接收訊號強度指標 (RSSI) 能用來估計與已知固定點之間的距離,但是對於室內定位系統 (IPS) 和資產追蹤等應用來說,這個技術往往還不夠精確。不過,藍牙規格的更新可讓定位變得更精確。
具體來說,最新版的藍牙核心規格 (v5.1) (以「藍牙 5.1 測向」名稱發佈) 增添了到達角 (AoA) 和出發角 (AoD) 測向功能,能讓開發人員更容易準確地判斷藍牙發射器在二維或三維中的位置。
本文是兩篇系列文章的第一篇,將介紹 AoA 和 AoD 技術,並解釋加強藍牙核心規格如何讓這些技術更容易實作。然後將介紹可用來實作測向應用的平台。
RF 測向技術
以 RSSI 為基礎的射頻 (RF) 測向功能,可依據訊號強度提供距離估算。若要達到更好的準確度,可從不同點進行多次距離測量。RSSI 的主要優勢在於每個裝置僅需一個天線,因此消除天線陣列帶來的複雜性、成本與尺寸問題。其缺點則在於缺乏精密度,僅提供 3 m 至 5 m 的準確度。
第二種常用的測向技術稱為到達時間 (ToA),這是無線電訊號從單一發射器傳到遠端單一接收器當中的行進時間。同樣的,採用這個方法,每個裝置僅需一個天線,但是缺點則是每個裝置都需要攜帶高準確度的同步時脈。ToA 系統的定位準確度可達 1 m。
隨著藍牙 5.1 規格的發佈,藍牙技術聯盟 (SIG) 選擇支援以 AoA 和 AoD 為基礎的第三種測向技術。
使用 AoA 技術時,接收裝置會追蹤個別物件的到達角;而使用 AoD 技術時,接收裝置則會利用多個信標發來的角度及其位置,計算自己在空間中的位置 (圖 1)。
 and AoD method (right)") 圖 1:在 AoA 測向方法 (左) 中,資產會將其位置廣播 (TX) 至 AoA 定位器,以測量訊號的到達角。而在 AoD 測向方法 (右) 中,信標會發射 AoD 資訊,同時行動裝置會接收 (RX) 信標訊號並計算位置。在兩個例子裡,接收裝置都需要有計算能力,才能計算發射器的方向。(圖片來源:Silicon Labs)
圖 1:在 AoA 測向方法 (左) 中,資產會將其位置廣播 (TX) 至 AoA 定位器,以測量訊號的到達角。而在 AoD 測向方法 (右) 中,信標會發射 AoD 資訊,同時行動裝置會接收 (RX) 信標訊號並計算位置。在兩個例子裡,接收裝置都需要有計算能力,才能計算發射器的方向。(圖片來源:Silicon Labs)
藍牙 5.1 能夠納入測向功能,一部份是因為一些企業公司的影響力。這些公司紛紛為低功耗藍牙 (BLE) 產品提供了自行研發的 AoA 和 AoD 解決方案。藍牙 5.1 更新了核心規格,能更容易地從 BLE 封包中擷取「IQ」訊號資料 (同相與正交相位資訊),從而讓開發人員能夠更輕鬆地利用 RF 測向功能。而這又使開發人員更容易實作定位服務應用。
舉例來說,AoA 方法適合追蹤發射訊號的 BLE 收發器。收發器使用單一天線發送可測向封包,而這些封包由多天線的「定位器」接收。定位器會對來自訊號封包的 IQ 資料進行採樣,同時切換陣列中的每個主動式天線;如此一來,便能偵測因陣列中各天線與該單一發射天線的距離差,所造成的訊號相位差。定位引擎隨即使用該相位差資訊,確定所接收訊號的角度,繼而得到發射器的方向 (圖 2)。
 圖 2:如果已知每個天線的訊號相位 (θ)、波長 (λ) 以及相鄰天線的間距,則可計算出無線電訊號的到達角。(圖片來源:藍牙技術聯盟)
圖 2:如果已知每個天線的訊號相位 (θ)、波長 (λ) 以及相鄰天線的間距,則可計算出無線電訊號的到達角。(圖片來源:藍牙技術聯盟)
結合從兩個或更多定位器計算而來的訊號方向,便能精確定位發射器的位置 (圖 3)。
 圖 3:透過計算兩個固定型定位器的訊號 AoA,便能計算出發射資產的三維位置。如果已知定位器的絕對座標,則還能計算出發射資產的絕對座標。(圖片來源:Silicon Labs)
圖 3:透過計算兩個固定型定位器的訊號 AoA,便能計算出發射資產的三維位置。如果已知定位器的絕對座標,則還能計算出發射資產的絕對座標。(圖片來源:Silicon Labs)
AoD 方法的情形則完全相反。在此場景中,擁有天線陣列的裝置會透過各自的天線發送訊號。當陣列中的天線所發出的每個訊號封包抵達接收器的單一天線時,由於訊號從發射器發出後所行進的距離不同,該訊號會與前一個訊號產生移相的現象 (圖 4)。
 圖 4:若使用 AoD 方法,當陣列中的天線所發出的每個訊號封包抵達接收器的單一天線時,由於訊號從發射器發出後所行進的距離不同,該訊號會與前一個訊號產生移相的現象。(圖片來源:藍牙技術聯盟)
圖 4:若使用 AoD 方法,當陣列中的天線所發出的每個訊號封包抵達接收器的單一天線時,由於訊號從發射器發出後所行進的距離不同,該訊號會與前一個訊號產生移相的現象。(圖片來源:藍牙技術聯盟)
接收裝置的天線會從訊號封包取得 IQ 樣本,並將其轉發到定位引擎,隨後定位引擎使用該資料確定所收到訊號的角度,繼而得到發射器的方向。這個系統適用於室內導覽等應用,其中發射器是固定的參考點,而接收器則是消費者的智慧型手機或類似的裝置。
藍牙 5.1 的更新
藍牙 5.1 要求對 RF 軟體協定 (或稱「堆疊」) 進行修訂,並對某些硬體 (無線電) 進行功能強化 (視晶片製造商而定)。首先,修訂的協定將固定頻率擴展訊號 (CTE) 新增至任何用於測向的藍牙封包。(封包未經修改,因此可用於標準的 BLE 通訊。)
CTE 是一種未調變的頻率訊號,以藍牙載波頻率加上 250 kHz 的頻率傳輸達 16 至 160 µs 的時間;若使用 BLE 更高的傳輸量模式時,有時會加上 500 kHz。此訊號包含一個由「1」組成的「未白化」序列,發射時間的長度足以讓接收器擷取 IQ 資料,而不會破壞調變。由於 CTE 訊號是最後發射的,所以封包的循環冗餘檢查 (CRC) 不受影響。
此規格的第二個重要補充,可讓開發人員更輕鬆地配置執行 IQ 採樣的協定。該配置包括設定採樣計時及天線切換,這對定位估算的精密度極為重要。
雖然可使用各種 IQ 採樣計時配置,但在每個天線的參考期間內,IQ 採樣通常是每隔 1 或 2 µs 記錄一次,並將結果記錄在 BLE SoC 的隨機存取記憶體 (RAM) 中。圖 5 顯示當陣列中的不同天線採樣接收的訊號時,訊號相位是如何變化的。[1]
 圖 5:來自單一發射器的訊號在到達天線後,會因天線與發射源的距離不同而產生不同的相位。(圖片來源:藍牙技術聯盟)
圖 5:來自單一發射器的訊號在到達天線後,會因天線與發射源的距離不同而產生不同的相位。(圖片來源:藍牙技術聯盟)
記錄 IQ 樣本只是構建定位服務的第一步。要完成這項任務,開發人員必需針對應用所使用的定位器和信標,設計或選擇最佳天線陣列,並掌握執行測向計算所需的複雜演算法。
計算訊號方向
測向技術使用的天線陣列一般分為三種類型:均勻線性陣列 (ULA)、均勻矩形陣列 (URA),以及均勻圓形陣列 (UCA)。顧名思義,線性陣列是一維陣列,矩形和圓形陣列則是二維陣列。ULA 的設計和實作最容易,但缺點是,只能在假定受追蹤裝置都在同一平面內移動的假設下計算方位角。如果實際情況與假設不同,則精密度會受到影響。URA 和 UCA 則能可靠地測量方位角和仰角 (圖 6)。
 圖 6:AoA 和 AoD 測向技術需要使用天線陣列,而常見的陣列類型包括線性、矩形和圓形。雖然每種類型的陣列均能取得方位角和仰角資訊,但是矩形和圓形陣列提供的方位角資料更加可靠。(圖片來源:Silicon Labs)
圖 6:AoA 和 AoD 測向技術需要使用天線陣列,而常見的陣列類型包括線性、矩形和圓形。雖然每種類型的陣列均能取得方位角和仰角資訊,但是矩形和圓形陣列提供的方位角資料更加可靠。(圖片來源:Silicon Labs)
設計測向所用的天線陣列並非易事。例如,置於陣列中的天線會因為相互耦合而干擾彼此的響應。為將此類效應納入考量,估計演算法通常需要使用預定義的陣列響應。例如,某個常用的商用演算法,在數學上假設該陣列由兩個相同的子陣列構成。幸運的是,對於缺乏天線專業知識的人士來說,可以使用已定義特性的商用天線陣列產品。
高效率的天線陣列可確保正確地蒐集 IQ 樣本,但是要判定訊號的方向,不能僅靠原始資料;這些資料必須經過處理,將多重路徑接收、訊號極化、傳播延遲、雜訊及抖動納入考量。
由於 RF 測向不是一項新的技術領域,在現實應用中,目前已有多數種成熟的數學技術,可根據取得的 IQ 樣本來估算到達角。定義問題並不難,即估算發射 (窄頻) 訊號到達接收陣列的到達角 (出發角的計算與此類似),但解開問題所需的數學運算卻沒有這麼簡單。
簡單地說,假定陣列的每個天線有一組 IQ 樣本資料集,該商用演算法會先根據以下的方程式,計算資料向量「x」(同時假設這些訊號為經過相移和縮放的正弦 (窄頻) 訊號):
![]() 方程式 1
方程式 1
其中「a」為天線陣列的數學模型 (「轉向向量」),
「s」為輸入訊號,「n」為雜訊項。
然後使用 x 及以下方程式產生 IQ 樣本協方差矩陣「Rxx」。
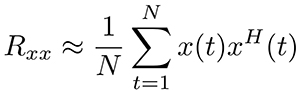 方程式 2
方程式 2
該樣本協方差矩陣隨後用作主估算演算法的輸入。最受歡迎且成熟的頻率估算與無線電測向演算法之一,就是多重訊號分類 (MUSIC)。從技術層面來說,MUSIC 會使用協方差矩陣的特徵向量分解及特徵值,根據訊號和雜訊子空間的特性來估算 AoA。
採用的方程式為:
![]() 方程式 3
方程式 3
其中,「A」為含有特徵值的對角矩陣,「V」為含有相應特徵向量的矩陣。
V 隔離後,即可用於方程式來產生偽頻譜,其中峰值出現在接收訊號的到達角處 (方程式 4)。
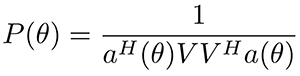 方程式 4
方程式 4
所產生的頻譜採用所示的形式,而峰值出現在發射訊號到達的方向 (圖 7)。[2]
 圖 7:MUSIC 演算法使用 IQ 樣本生成功率偽頻譜,其峰值標識出發射裝置的位置。本範例顯示一個 2-D 偽頻譜,其中發射裝置位於 50 度方位角和 45 度仰角的位置處。(圖片來源:Silicon Labs)
圖 7:MUSIC 演算法使用 IQ 樣本生成功率偽頻譜,其峰值標識出發射裝置的位置。本範例顯示一個 2-D 偽頻譜,其中發射裝置位於 50 度方位角和 45 度仰角的位置處。(圖片來源:Silicon Labs)
執行測向演算法是一項運算密集型任務,需要大量的 RAM 和快閃記憶體容量。
巿面上已有具備適當資源的商用藍牙 5.1 產品。例如,Dialog Semiconductor 針對定位服務應用推出 DA14691 藍牙 5 LE SoC。此晶片內建 Arm® Cortex®-M33 微處理器並提供 512 KB RAM。Silicon Labs 則針對自家的 EFR32BG13 BLE SoC 推出藍牙 5.1 堆疊;此晶片採用 Arm Cortex-M4 微處理器,並提供 64 KB RAM 和 512 KB 快閃記憶體。
而 Nordic Semiconductor 又更進一步,推出全新的「測向」硬體 nRF52811。此款 BLE SoC 與藍牙 5.1 相容,內建 Arm Cortex M4 微處理器,並搭配 Nordic 的高端 nRF52840 無線 SoC 多重協定無線電。此晶片提供 192 KB 快閃記憶體以及 24 KB RAM。
本系列文章第 2 篇將說明如何使用以這些 SoC 與堆疊為基礎的開發平台,實作實用的定位服務應用,如資產追蹤和 IPS 等;另外還會說明此平台額外的元件,包括天線陣列、隨附的微處理器和相關記憶體,以及「定位引擎」韌體。
結論
藍牙 5.1 所採用的核心規格最近進行了增強,存取 IQ 資料變得更為容易。這些資料可用於饋送 RF 測向演算法,由其計算藍牙無線電傳輸的 AoA 或 AoD,然後使用該資訊估算發射器在二維或三維中的位置。
但是,儘管此演算法可用作資產追蹤和 IPS 等實用定位服務應用的基礎,但其精確度仍須仰賴設計良好的天線陣列、成熟的 RF 測向演算法,以及足以執行複雜計算的處理器和記憶體資源。
正如本系列文章第 2 篇將要展示的內容,雖然此項開發工作遠非易事,但巿面已有商用的藍牙 5.1 測向平台、天線陣列,以及定位引擎韌體,能讓設計人員更輕鬆地開始構建精密度達公分等級的定位服務應用。
參考資料
- Bluetooth Direction Finding: A Technical Overview, Martin Wooley, Bluetooth SIG, March 2019.
- Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing, Sauli Lehtimaki, Silicon Labs, 2018
聲明:各作者及/或論壇參與者於本網站所發表之意見、理念和觀點,概不反映 DigiKey 的意見、理念和觀點,亦非 DigiKey 的正式原則。