使用整合式 FOC 馬達控制與進階感測器減輕 EV 里程焦慮並提升安全性
資料提供者:DigiKey 北美編輯群
2022-01-05
電動車 (EV) 與混合動力車 (HEV),兩者通常會一起簡稱為 xEV 系統,目前不斷受到壓力,要讓每次充電達到更高里程數,藉此減輕里程焦慮,並且減少車輛碳足跡。於此同時,也需要添加更多馬達、感測器、相關電子元件、處理器與軟體來達到更高的汽車自主性、使用者功能與安全性,同時更要降低成本。
用在車門、車窗、電池散熱風扇、暖氣風扇與幫浦,以及其他功能的馬達,是特別棘手的問題,因為不只會增添重量,還需要進階控制演算法,例如磁場導向控制 (FOC),以將雜訊與功耗降至最低,同時還要確保順暢的反應。整體系統設計作業相當複雜,因為不只要符合 ISO 26262 功能安全性要求,也要符合 AEC-Q100 品質標準。
為了克服這些難題,設計人員可改用多種汽車級裝置,以更高級的軟硬體,來簡化設計與眾多功能的整合作業,同時減少零件數與整體覆蓋區。
本文將探討 EV 與 HEV 設計人員所面臨的挑戰。接著會介紹並展示如何使用高度整合的 FOC 無刷直流 (BLDC) 馬達控制器和相關評估板,開始有效的 EV/HEV 馬達設計。也會介紹多種感測器來監測電流、3D 位置、速度和方向,皆可從單一貨源取得,即 Allegro MicroSystems。
電動車面臨的成本、安全性和里程焦慮問題
xEV 的設計人員必須解決的問題很多,包括車輛成本、安全性和可靠性,尤其是對車輛自主性、每次充電的行駛里程 (里程焦慮),以及電池組壽命的要求不斷提高之下。
為了支援安全性和可靠性,需要採用符合先進駕駛輔助系統 (ADAS) 功能要求的進階感測器,如 ISO 26262 標準所示。在成本與里程考量下,設計人員已經轉用更高電壓的最高 800 V 電軌,以提升效率並減輕纜線重量,同時還可享受電池組設計改良所帶來的優勢。
舉例而言,更優秀的電池熱管理可促進更高的行駛里程數並延長電池壽命,還可改善 EV 與 HEV 牽引逆變器的散熱效果,有助於提升功率與能量密度並減輕重量。
即便更高的半導體裝置整合度,可促成更高的功能性,並且減少重量與佔用空間,但必要的散熱風扇所需的 BLDC 馬達,必須受到嚴密控制,以發揮最佳化效率。為了達到此目標,最好採納進階馬達控制演算法,例如在馬達控制器閘極驅動器上採用 FOC。
高效能散熱
FOC 能讓電動馬達在整個速度範圍內工作更加順暢,並可在啟動時就產生完整扭力。除此之外,FOC 也可提供快速順暢的馬達加速度與減速,此特點對於想在高效能運動應用中達到準確控制時相當有用。FOC 也可用來開發高效率、緊湊、安靜的低電壓 (LV,即 50 VDC 以下) 驅動器,可用於多種高達 500 W 的高效能 BLDC 馬達。這些馬達通常用於 xEV 高電壓 (HV) 電池散熱風扇,以及暖通空調 (HVAC) 鼓風機、HV 牽引逆變器散熱系統的水冷幫浦。
") 圖 1:FOC 馬達控制器可使用 LV 電池電力對 xEV HV 電池與 HV 牽引逆變器進行散熱。(圖片來源:Allegro MicroSystems)
圖 1:FOC 馬達控制器可使用 LV 電池電力對 xEV HV 電池與 HV 牽引逆變器進行散熱。(圖片來源:Allegro MicroSystems)
在傳統設計中,FOC 是以外部感測器搭配微控制器來實作。此設計稱為直接 FOC,作法較為複雜,且往往會有動態響應減少的問題,這是因為仰賴外部感測器來測量馬達的工作參數所致。
FOC 要提升效能並降低成本,可行的作法就是摒棄外部感測器。
沒有感測器後,實作 FOC 所需的資訊則可藉由馬達端子,從馬達繞組的反電動勢 (BEMF) 中的電壓與電流擷取而得。雖然硬體較簡單,但無感測器 FOC 的實作需要更複雜的控制軟體。
無感測器 FOC 演算法可促成最高的效率和動態響應,同時將噪音降至最低。當馬達沒有 BEMF 的資訊而處於靜止狀態時,還可提供穩健的開迴路啟動。
汽車散熱風扇和幫浦用的簡易 FOC
絕大多數 FOC BLDC 驅動器都需要軟體開發人員將演算法寫入並移植到微處理器或微控制器,但 Allegro MicroSystems 的 A89307KETSR-J 則將無感測器 FOC 演算法直接整合到閘極驅動器中。A89307KETSR-J 僅配備 5 個外部被動元件 (4 個電容和 1 個電阻),可將物料清單 (BOM) 縮減至最小、提升可靠性並且降低設計複雜性 (圖 2)。
") 圖 2:典型的 A89307KETSR-J xEV 電池組散熱風扇應用電路指出有五個外部元件:四個電容與一個電阻。(圖片來源:Allegro MicroSystems)
圖 2:典型的 A89307KETSR-J xEV 電池組散熱風扇應用電路指出有五個外部元件:四個電容與一個電阻。(圖片來源:Allegro MicroSystems)
A89307KETSR-J 閘極驅動器的工作電壓介於 5.5 至 50 VDC。整合式 FOC 演算法含有恆定扭力與恆定功率,以及開迴路與恆定速度工作模式。A89307KETSR-J 含有用於脈寬調變 (PWM)、時脈模式速度控制、制動和方向的輸入,以及用於故障條件和馬達速度的輸出訊號 (圖 3)。
") 圖 3:A89307KETSR-J 的內部方塊圖顯示出 FOC 控制器 (中)、PWM 或時脈模式速度控制 (SPD)、制動 (BRAKE) 和方向 (DIR) 的輸入 (左側),以及故障 (FAULT) 和馬達速度 (FG) 的輸出 (同樣在左側)。(圖片: Allegro MicroSystems)
圖 3:A89307KETSR-J 的內部方塊圖顯示出 FOC 控制器 (中)、PWM 或時脈模式速度控制 (SPD)、制動 (BRAKE) 和方向 (DIR) 的輸入 (左側),以及故障 (FAULT) 和馬達速度 (FG) 的輸出 (同樣在左側)。(圖片: Allegro MicroSystems)
A89307KETSR-J 經過最佳化,可驅動外部低導通電阻 N 通道功率 MOSFET。可以提供必要的大峰值驅動電流,以便快速啟動與關閉 MOSFET,以便在切換時將功率耗散降至最低、提升工作效率並且減少熱管理疑慮。提供多個閘極驅動器位準,能讓設計人員在電磁干擾 (EMI) 輻射與效率之間達到最佳取捨。快速啟動 MOSFET 可降低切換損耗,但會增加 EMI,而延緩 MOSFET 啟動則會減少 EMI,但代價是切換損耗會增加且效率降低。
馬達速度可透過 PWM、類比或時脈輸入進行控制。閉迴路速度控制也是一個選項,會搭配可編程的每分鐘轉動 (RPM) 對時脈頻率比率。無感測器的啟動控制包含順向與逆向的預轉動 (風車) 偵測與同步化,因此能讓 A89307KETSR-J 在多種馬達與負載配置下工作。
Allegro MicroSystems 的非逆向啟動演算法亦可提升啟動效能。馬達會在通電後以正確方向啟動,而不會逆向振動或搖晃。軟啟動軟關閉功能可在「啟動」命令下 (風車狀態),逐漸提高輸往馬達的電流,在「關閉」命令下逐漸降低馬達的電流,進而降低噪音 (圖 4)。
 圖 4:A89307KETSR-J 在軟啟動 (頂端) 與軟關閉 (底部) 下的波形,可達到順暢的馬達操作並降低噪音。(圖片來源:Allegro MicroSystems)
圖 4:A89307KETSR-J 在軟啟動 (頂端) 與軟關閉 (底部) 下的波形,可達到順暢的馬達操作並降低噪音。(圖片來源:Allegro MicroSystems)
A89307KETSR-J 含有一個 I2C 介面,可用於設置馬達額定電流、電壓、速度、電阻和啟動設定檔。I2C 亦可實作開/關與速度控制,以及速度回饋和故障訊號。
無感測 FOC 評估板
設計人員可以使用 APEK89307KET-01-T-DK 評估板和相關軟體,透過 A89307KETSR-J 來加快 FOC 式 BLDC 馬達驅動的開發 (圖 5)。此板件含有 A89307KETSR-J,可存取所有輸入和輸出引腳,以及一個完整的三相功率級,可用來驅動 BLDC 馬達。設計人員可以透過簡易的圖形使用者介面 (GUI) 來選擇 FOC 驅動參數,然後將其載入到晶片上 EEPROM。A89307KETSR-J 的最小 BOM 需求能讓驅動器的設計裝進馬達外罩內,進一步縮減解決方案尺寸。
 圖 5:APEK89307KET-01-T-DK 評估板具有 A89307KETSR-J (U1,板件的中間靠左側),以及六個功率 MOSFET 來驅動 BLDC 馬達。(圖片來源:Allegro MicroSystems)
圖 5:APEK89307KET-01-T-DK 評估板具有 A89307KETSR-J (U1,板件的中間靠左側),以及六個功率 MOSFET 來驅動 BLDC 馬達。(圖片來源:Allegro MicroSystems)
ADAS 感測器
xEV 系統的設計人員需要感測馬達驅動器、DC-DC 轉換器和逆變器的電流位準,以及節流閥和氣缸的旋轉位置,以及變速器中齒輪的速度和方向,以實作緊湊且符合成本效益的 ADAS 功能。Allegro MicroSystems 為 ADAS 提供窩種感測器解決方案,包括:
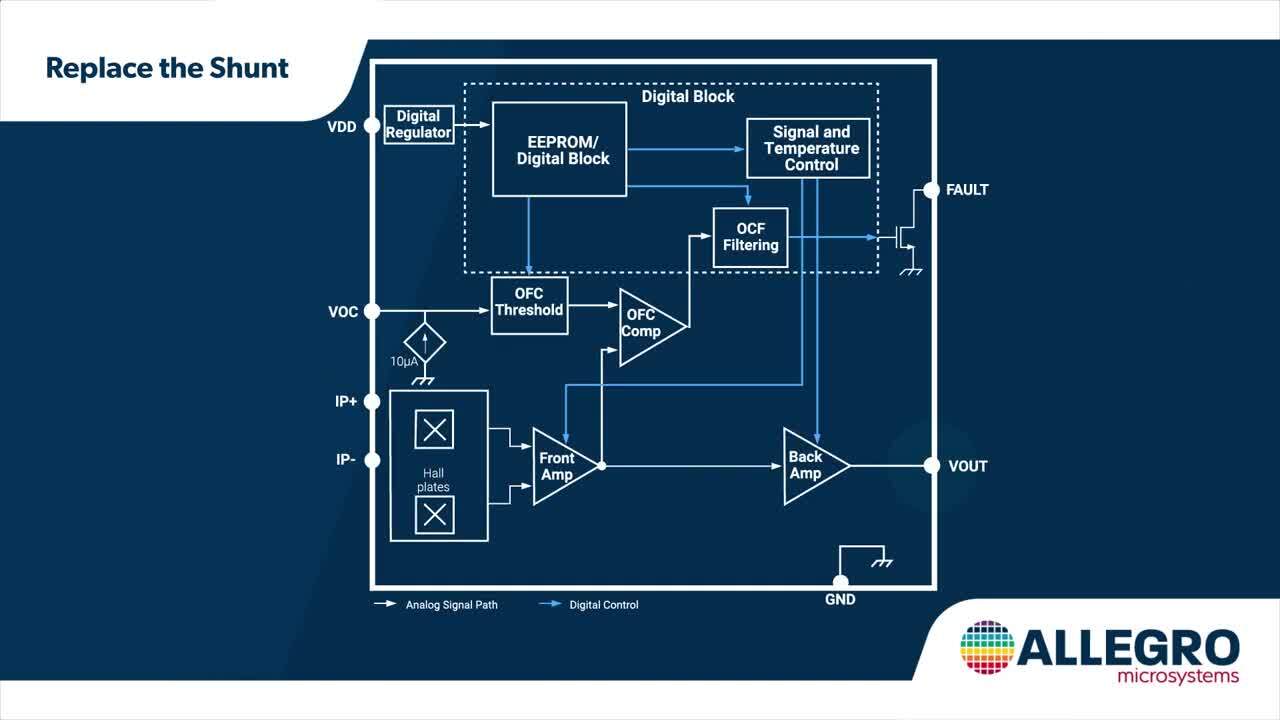
電流感測:ACS72981KLRATR-150B3 提供設計人員經濟實惠且精準的 AC 或 DC 電流感測。此高精準的線性霍爾效應電流感測器,頻寬為 250 kHz,其設計可用於馬達控制、DC-DC 轉換器控制、逆變器控制,以及負載偵測與管理。這是符合 AEC-Q100 標準的 IC,反應時間不到 2 µs,可支援安全關鍵應用的快速過電流故障偵測需求。
3D 位置感測器:可使用 Allegro MicroSystems 的 A31315LOLATR-XY-S-SE-10 3DMAG IC,即可快速實作非接觸式線性和旋轉 3D 磁性位置感測,可用於油門、節流閥、氣缸和變速箱位置的偵測。此裝置可以測量水平和垂直平面上的旋轉運動,並測量左右或前後的線性運動 (圖 6)。
 圖 6:A31315LOLATR-XY-S-SE-10 3D 位置感測器可以測量水平和垂直平面上的旋轉運動,並測量左右或前後的線性運動。(圖片來源:Allegro MicroSystems)
圖 6:A31315LOLATR-XY-S-SE-10 3D 位置感測器可以測量水平和垂直平面上的旋轉運動,並測量左右或前後的線性運動。(圖片來源:Allegro MicroSystems)
A31315LOLATR-XY-S-SE-10 感測器為設計人員提供了比例式類比、PWM 或 SAE J2716 單邊半字傳輸 (SENT) 輸出格式。此產品的開發用意就是要符合汽車安全相關系統的 ISO 26262 ASIL B (單晶粒,採用 SOIC-8 封裝),以及 ASIL D (備援雙晶粒,採用 TSSOP-14 封裝) 規定。
速度和方向:ATS19520LSNBTN-RSWHPYU 是一款耐振動、差動霍爾效應的傳動速度和方向輪齒感測器,並有提供順向和逆向感測用的型號 (圖 7)。
 圖 7:在此所示的 ATS19520「F」款式,可測量輪齒從引腳 1 到引腳 3 的順向轉動 (頂端),以及輪齒從引腳 3 到引腳 1 的逆向轉動 (底部)。「R」款式會測量反方向的轉動。(圖片來源:Allegro MicroSystems)
圖 7:在此所示的 ATS19520「F」款式,可測量輪齒從引腳 1 到引腳 3 的順向轉動 (頂端),以及輪齒從引腳 3 到引腳 1 的逆向轉動 (底部)。「R」款式會測量反方向的轉動。(圖片來源:Allegro MicroSystems)
ISO 26262 ASIL B 級感測器具有整合式診斷功能,適用於 xEV 傳動系統。三引腳單列直插式封裝 (SIP) 含有一個整合式回授偏壓磁鐵,可測量轉動鐵質目標的速度和方向,以及一個整合式電容,可確保電磁相容性。
結論
整合式無感測器 FOC BLDC 馬達驅動器,搭配電流感測器、磁性位置感測器和旋轉感測器,就是促成高效率且安全 xEV 設計的關鍵元件,可達到更高行駛里程並降低碳足跡。特別是 FOC 馬達驅動器的使用,可設計出更有效率且更寧靜的散熱系統,並可改善電池組和牽引逆變器的動態響應。就其本身而言,採用緊湊、精確和節能的感測器對於 xEV 的開發而言相當關鍵,才能滿足進階駕駛輔助系統的可靠性要求,以及 ISO 26262 的功能安全性要求。
推薦閱讀
聲明:各作者及/或論壇參與者於本網站所發表之意見、理念和觀點,概不反映 DigiKey 的意見、理念和觀點,亦非 DigiKey 的正式原則。