如何快速實作定位用的多星座 GNSS 模組
資料提供者:DigiKey 北美編輯群
2021-09-09
機器人、自駕車、工業自動化、物流和資產追蹤、無人機、農業和重型工地設備等許多應用,皆已開始使用多星座全球導航衛星系統 (GNSS) 接收器,接收歐洲的 Galileo、美國的全球定位系統 (GPS)、俄羅斯的 GLONASS、中國的北斗導航衛星系統、日本的 QZSS 等訊號,來讓以位置為基礎的功能更加普及。使用多星座 GNSS 接收器的優勢包括:更理想的定位、導航、授時 (PNT) 訊號可用性,更高的準確度和完整性,以及更佳的應用穩健性。
但是,開發多星座接收器是一項複雜又耗時的活動,工作內容包括:最佳化 L 波段天線;設計無線射頻 (RF) 前端;整合基頻訊號處理演算法來獲得各種 PNT 訊號,並加以追蹤與校正;編寫應用的處理軟體,以便從基頻的每個通道中提取 PNT 數據,並使用這些資訊來實現系統功能。設計人員還必須選擇合適的天線,並將其正確放置。
不想這麼麻煩的話,設計人員可以直接使用預先設計好的 GNSS 模組和開發環境,快速、有效地將定位功能整合到系統中。這些 GNSS 模組包括 RF 前端、基頻處理和嵌入式韌體,可加速應用處理軟體的開發工作。有些 GNSS 模組還包含天線。
本文將探討 GNSS、PNT 的基礎知識,以及多星座 GNSS 接收器的操作。接著,我們會說明將天線整合到 GNSS 模組中的利弊,再介紹幾種 GNSS 模組 (有/無整合式天線),以及 STMicroelectronics、Septentrio、Würth Elektronik 推出的相關評估板,設計人員可以加以運用,透過最高效率、最具成本效益的方式,開發出準確而穩定的位置服務應用。
GNSS 和 PNT 是什麼?
GNSS 和 PNT 是密切相關的概念。GNSS 衛星是最常見的 PNT 訊號來源。GNSS 衛星基本上是極為準確的同步時脈,會不斷廣播其 PNT 資訊。GNSS 模組可接收來自特定衛星的 PNT 訊號,並計算出自己與該衛星的距離。當接收器知道自己與至少四顆衛星相距多遠時,就能估算自己的位置。然而,估算位置的準確度會受到多種誤差源的影響,包括:
- GNSS 衛星計時電路的時脈漂移
- 預測 GNSS 衛星的確切軌道位置時不準確
- 整體衛星設備相對於其他衛星的一般效能漂移,又稱為衛星偏差
- 訊號傳輸通過電離層和對流層時,出現的失真和延遲
- 接收器中的多徑反射和可變效能及漂移
設計人員可以使用多種技術來校正衛星和大氣引起的 GNSS 誤差。
提高 GNSS 效能
將 GNSS 接收器引起的誤差影響降至最低的最佳方法,是在特定應用的成本和尺寸限制內,使用最高效能的接收器。但即使是高效能的接收器,也不代表十全十美,它們的效能很可能還有進步空間。瞭解以下的校正方法是非常重要的步驟,因為它們提供不同的效能,而且有些 GNSS 模組並不能進行所有的校正方法。
數種 GNSS 校正方法都用到地面參考站 (圖 1)。使用地面參考站來為接收器提供 GNSS 校正的最成熟方法是「即時動態定位」(RTK) 和「精密單點定位」(PPP)。最近,混合式 RTK-PPP 方法也已問世。
 圖 1:GNSS 使用者接收器可以從參考網路獲得關於大氣、時脈和軌道誤差的資訊,提高定位準確度。(圖片來源:Septentrio)
圖 1:GNSS 使用者接收器可以從參考網路獲得關於大氣、時脈和軌道誤差的資訊,提高定位準確度。(圖片來源:Septentrio)
RTK 仰賴單個基地台或本地參考網路來取得校正數據,以便消除大部分 GNSS 誤差。RTK 假設基地台和接收器相距不遠 (最多相距 40 公里/25 英里),因此它們會遇到相同的誤差。動態後處理 (Post-Processed Kinematic,PPK) 是基於 RTK 的一種技術,廣泛用於測繪,能獲得高精準度的定位數據或公分級準確度。
只有軌道和衛星時脈誤差會用在 PPP 校正上。這些衛星引起的誤差與使用者所在位置無關,因此就不需要這麼多參考站。然而,PPP 不考慮大氣相關的誤差,因此相對於 RTK,PPP 的準確度較低。此外,PPP 校正的初始化時間可長達 20 分鐘。PPP 較長的初始化時間和較低的準確度,對於許多應用來說不切實際。
如果應用需要用到接近 RTK 的準確度和快速的初始化時間,則通常會採用最新的 GNSS 校正服務 RTK-PPP,有時稱為「狀態空間表示」(SSR)。它使用的是參考網路,各參考站相隔約 100 公里 (65 英里),可收集 GNSS 數據,並計算出衛星和大氣校正數據。參考網路會利用網際網路、衛星或行動電話網路,向訂閱者傳送校正數據。使用 RTK-PPP 的 GNSS 接收器可以達到 Sub-Decimeter 的準確度。要在 RTK、PPP 和 RTK-PPP 校正方法之間進行抉擇,會牽涉到設計上的許多取捨,開發人員需要審慎評估,才能為特定應用選出最適合的解決方案。(圖 2)。
 圖 2:三種常見 GNSS 校正方法的優缺點。(圖片來源:Septentrio)
圖 2:三種常見 GNSS 校正方法的優缺點。(圖片來源:Septentrio)
星基增強系統 (SBAS) 已逐步在不同區域開放使用,取代 RTK、PPP 和 RTK-PPP 地面站校正方法。SBAS 依然使用地面站來測量 GNSS 誤差,但這些地面站可是遍布了整個大陸板塊。測量到的誤差會在一個中心位置進行處理,待計算出校正數據後,再將其傳輸到覆蓋區域上方的地球同步衛星。校正數據會從衛星廣播出來,作為原始 GNSS 數據的疊加或增強。
GNSS 準確度取決於衛星量測和相關校正的可用性和準確度。高效能 GNSS 接收器會以多個頻率追蹤 GNSS 訊號,並使用多個 GNSS 星座及各種校正方法,來提供所需的準確度和恢復能力。即使某些衛星量測和數據受到干擾,這種備援方式也能實現穩定的效能。設計人員可以從各種 GNSS 準確度和備援功能中進行選擇 (圖 3)。
 圖 3:GNSS 準確度等級、對應的校正方法和應用範例。(圖片來源:Septentrio)
圖 3:GNSS 準確度等級、對應的校正方法和應用範例。(圖片來源:Septentrio)
GNSS 模組:整合式天線 vs 外接式天線
考量到多星座定位的複雜性,各大供應商均推出相關模組,來協助加速產品上市、降低成本並確保效能。即便如此,設計人員還是需要思考:該使用內部天線,還是選擇位於 GNSS 模組外部的天線?如果應用較重視上市速度和成本,則可能較適合整合式天線,因為所需的工程量要少得多。對於需要 FCC 或 CE 認證的應用,使用內建整合式天線的模組也可以加速審核流程。然而,整合式天線解決方案的尺寸可能較大,靈活性也可能受限。
外接式天線能為設計人員提供更廣泛的效能和佈局選項。可以自由選擇大型的高效能天線,或小型的低效能天線。此外,天線擺放也能更彈性地配合 GNSS 模組的位置,進一步提高設計靈活性。擺放的靈活性還能讓外接式天線提供更可靠的 GNSS 操作。然而,擺放天線和連接佈線可能會是複雜且耗時的過程,需要特定的專業知識,這可能會增加成本並拖慢上市速度。
適合空間有限設計的小型 GNSS 模組
已有天線擺放和佈線所需專業知識的設計團隊可以使用 STMicroelectronics 的 Teseo-LIV3F,這是一種使用外部天線的多星座 (GPS/Galileo/GLONASS/BeiDou/QZSS) GNSS 模組 (圖 4)。此模組採用 LCC-18 封裝,尺寸為 9.7 mm x 10.1 mm,具有 1.5 m 圓形機率誤差 (CEP) 定位準確度,冷啟動和熱啟動的首次定位時間 (TTFF) 最短分別為 32 秒和 1.5 秒內 (GPS、GLONASS)。它的待機功耗為 17 µW,追蹤功耗為 75 mW。
 圖 4:Teseo-LIV3F GNSS 模組在 9.7 mm x 10.1 mm 的封裝中包含 GNSS 核心、子系統,以及所有必要的連接和電源管理。需要使用外接式天線。(圖片來源:STMicroelectronics)
圖 4:Teseo-LIV3F GNSS 模組在 9.7 mm x 10.1 mm 的封裝中包含 GNSS 核心、子系統,以及所有必要的連接和電源管理。需要使用外接式天線。(圖片來源:STMicroelectronics)
Teseo-LIV3F 的板載 26 MHz 溫度補償晶體振盪器 (TCXO) 有助於確保高準確度,專用的 32 kHz 即時時脈 (RTC) 振盪器則可縮短首次定位時間 (TTFF)。16 Mbit 嵌入式快閃記憶體可以實現數據記錄、七天自主輔助 GNSS、韌體 (FW) 可重構性,以及韌體升級等功能。
適合 Teseo-LIV3F 的應用包括保險、物流、無人機、收費、防盜系統、人寵定位、車輛追蹤和緊急呼叫。
Teseo-LIV3F 模組是已預先認證的解決方案,因此可以加快最終應用的上市速度。它的工作溫度範圍為 -40°C 至 +85°C。
如要實驗此模組並加速應用開發工作,設計人員可以使用 AEK-COM-GNSST31 評估板。與 X-CUBE-GNSS1 韌體結合使用時,這款評估套件可以支援採集、追蹤、導航和數據輸出功能,無需外部記憶體。此 EVB 還能與 SPC5 微控制器搭配使用,進行汽車應用開發。
具有干擾抑制功能的 GNSS 模組
Septentrio 的 410322 mosaic-X5 多星座 GNSS 接收器是一款低功率的表面黏著式模組,尺寸為 31 mm x 31 mm x 4 mm,可為設計人員提供多種介面,包括四個 UART、乙太網路、USB、SDIO 和兩個使用者可編程 GPIO。
mosaic-X5 是專為機器人、自主系統和其他大眾市場應用而設計,具有 100 Hz 的更新率、低於 10 ms 的延遲,垂直和水平 RTK 定位準確度分別為 0.6 cm 和 1 cm。它可以追蹤所有 GNSS 星座,支援現有和未來的訊號,並相容於 PPP、SSR、RTK、SBAS 校正。模組的 TTFF 在冷啟動時低於 45 秒,在熱啟動時低於 20 秒。
mosaic-X5 採用多項 Septentrio 專利技術,包括 AIM+ 這項板載干擾抑制技術,可抑制舉凡簡單的連續窄頻訊號到複雜的廣頻、脈衝干擾器等各種干擾。
模組的介面、命令和數據訊息都有完整的文件說明。隨附的 RxTools 軟體可進行接收器配置和監測,以及數據記錄和分析。
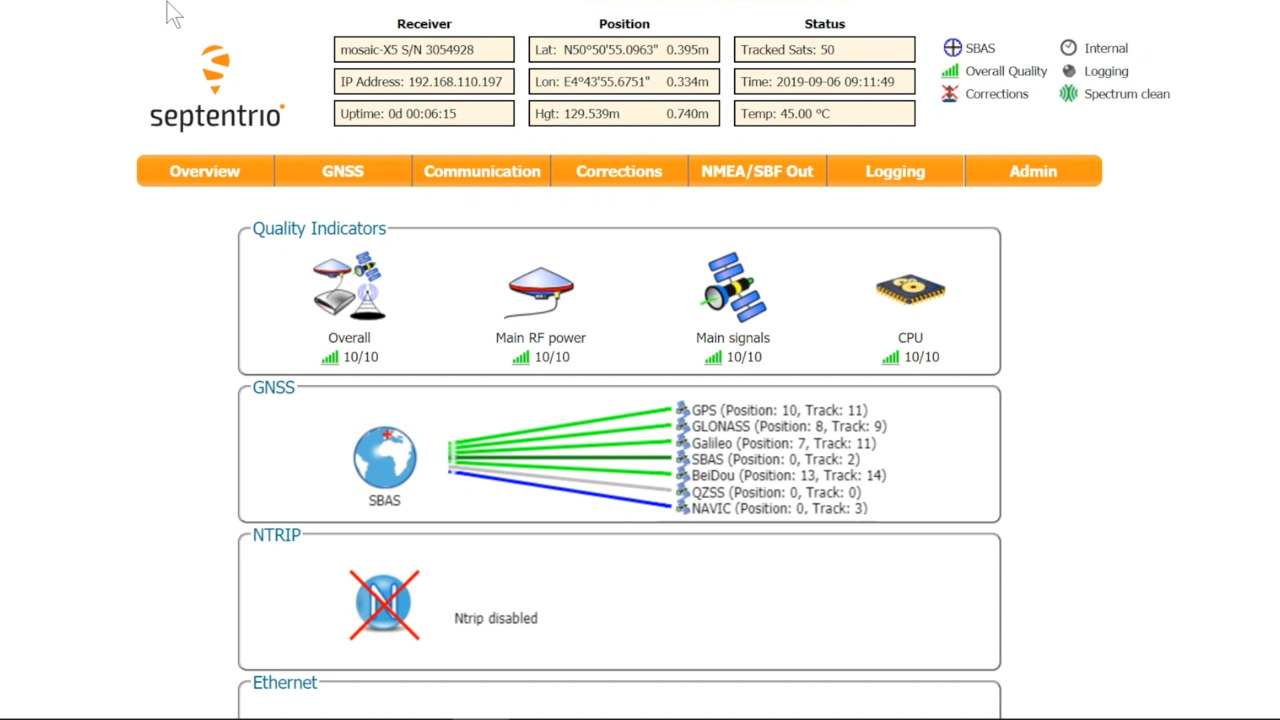
Septentrio 的 410331P3161 mosaic-X5 開發套件能讓設計人員加以探索、評估,開發出充分利用 mosaic-X5 功能的原型 (圖 5)。
 圖 5:設計人員可以使用 410331P3161 mosaic-X5 開發套件,透過各種連接 (包括乙太網路、COM 連接埠或 USB 2.0) 或使用 SD 記憶卡來打造原型。(圖片來源:Septentrio)
圖 5:設計人員可以使用 410331P3161 mosaic-X5 開發套件,透過各種連接 (包括乙太網路、COM 連接埠或 USB 2.0) 或使用 SD 記憶卡來打造原型。(圖片來源:Septentrio)
套件使用 mosaic-X5 直覺的 Web 使用者介面,可輕鬆進行操作和監測,方便設計人員從任何行動裝置或電腦控制接收器模組。Web 介面採用容易閱讀的品質指示器來監測接收器的操作。
設計人員可以使用以下任一種連接方式來整合 mosaic 開發套件,輕鬆打造出原型:乙太網路、COM 連接埠、USB 2.0、SD 記憶卡。
內建整合式天線的 GNSS 模組
若應用能受惠於內建整合式天線的 GNSS 模組,則設計人員可以考慮 Würth Elektronik 具有高效能系統單晶片 (SoC) 的 2614011037000 Erinome-I 模組 (圖 6)。此模組支援 GPS、GLONASS、Galileo 和北斗 GNSS 星座,並隨附頂部整合式天線,可簡化硬體整合工作、加速產品上市。整個模組的尺寸為 18 mm x 18 mm (包含整合式天線)。
 圖 6:2614011037000 Erinome-I 是一款完整的 GNSS 模組,具有高效能 GNSS SoC 和整合式天線。(圖片來源:Würth Elektronik)
圖 6:2614011037000 Erinome-I 是一款完整的 GNSS 模組,具有高效能 GNSS SoC 和整合式天線。(圖片來源:Würth Elektronik)
模組還包含 TCXO、RF 濾波器、低雜訊放大器 (LNA) 和序列式快閃記憶體。
Würth 亦提供用於 Erinome-I 的 2614019037001 評估板 (EVB) (圖 7)。EVB 還能當作公版設計,將 GNSS 模組整合到應用中。提供 USB 連接埠,可將 EVB 連接到 PC。多引腳連接器能讓設計人員存取 GNSS 模組的所有引腳。
 圖 7:Erinome-I 的 2614019037001 評估板 (靠近板中心,整合式天線位於模組中心) 也可當作公版設計。(圖片來源:Würth Elektronik)
圖 7:Erinome-I 的 2614019037001 評估板 (靠近板中心,整合式天線位於模組中心) 也可當作公版設計。(圖片來源:Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) 是一套簡單的 PC 工具,可使用 UART 介面來與 Erinome-I GNSS 模組進行互動。支援項目包括:
- 控制 EVB 操作
- 與 Erinome-I 模組進行雙向通訊
- 評估 Erinome-I 的特點和功能
- 熟悉 Erinome-I 的通訊協定、語句和命令
- 就算不具備通訊協定相關知識,也能配置 Erinome-I
- 解析 Erinome-I 使用的語句和命令
即使不熟悉進階知識,WENSS 也能讓您輕鬆評估定位應用。經驗豐富的開發人員還是可以使用 WESS 來進行較進階的配置。
結論
使用多個星座搭配相關的校正技術支援,就能最有效地實現準確又可靠的定位能力。雖然這些系統相當複雜,但好在設計人員可以求助於預先設計好的 GNSS 模組、相關開發套件和環境,快速而有效率地比較各種選項,實現基於位置的功能和服務。
推薦閱讀
聲明:各作者及/或論壇參與者於本網站所發表之意見、理念和觀點,概不反映 DigiKey 的意見、理念和觀點,亦非 DigiKey 的正式原則。