如何整合 GaN 功率級達到高效的電池供電式 BLDC 馬達推進系統
2023-02-22
諸如協作機器人 (cobot)、電動自行車、工業無人機以及電動工具等採用電池供電的應用領域,皆需要輕盈且小巧外型尺寸的電動馬達。無刷直流 (BLDC) 馬達是優秀的選擇,但馬達驅動電子元件相當複雜且有諸多設計考量。設計人員必須精確地調節扭力、速度和位置,還要將振動、雜訊和電磁輻射 (EMR) 降至最低,以確保到高度精確。此外,還要避免採用笨重的散熱片和外部線束,以減輕重量,並節省空間和成本。
設計人員經常面臨的一項挑戰就是,要在時間與預算的壓力下平衡設計需求,同時還要避免發生高成本的開發錯誤。要達到上述目標,有個作法就是運用諸如氮化鎵 (GaN) 等快速、低損耗的半導體技術,達到驅動 BLDC 馬達所需的功率級。
本文將探討 GaN 架構功率級的相對優勢,並介紹 EPC 運用半橋拓撲實作的裝置範例。此外還會說明如何使用相關開發套件快速開展專案。在此過程中,設計人員將可瞭解如何利用 Microchip Technology 的 motorBench 開發套件,在最少編程的情況下,測量 BLDC 馬達的參數,並在無感測器磁場導向控制 (FOC) 模式下操作。
GaN 的優點
為了在電池應用領域中有效控制 BLDC 馬達,開發人員需要採用小型尺寸的高效輕巧驅動級,以便在實作時盡可能地靠近致動器。例如,在馬達外罩內部實作。
絕緣閘雙極電晶體 (IGBT) 強大穩固,在最大 200 kHz 下可切換最高 100 MW 的大功率,但不適合用於需管理電池充電電壓高達 80 V 的裝置。在高接觸電阻、續流二極體、切換損耗以及關閉時的電流尾等因素相加之下,會導致訊號失真、產生額外熱能和雜散輻射。
相較於 IGBT,金屬氧化物半導體場效電晶體 (MOSFET) 的切換速度更快,而且切換與阻抗損耗較低,但其閘極電容需要強大的閘極驅動器,以在高切換頻率下運作。高頻運作能力對於設計人員而言非常重要,原因在於可使用小巧的電子元件來降低整體空間需求。
選擇具備高載子遷移率的 GaN 高電子遷移率電晶體 (HEMT),可讓設計人員以極快且低損耗的方式建構與分解半導體接面。像是 EPC 的 EPC23102ENGRT 等整合式 GaN 驅動器,就具備超低切換損耗與高切換頻率特點,可在極為狹小的空間中達到緊湊的裝置設計。單晶片包含帶有位準移位器的輸入邏輯介面、自舉負載和閘極驅動器電路,而此電路可控制半橋拓撲配置的 GaN 輸出 FET (圖 1)。晶片封裝經過最佳化,可達到高散熱與低寄生電感。
") 圖 1:EPC23102 包含控制邏輯、位準移位器、閘極驅動器,以及採用半橋拓撲的 GaN 輸出 FET (左側)。晶片封裝 (右側) 經過最佳化,可達到高散熱與低寄生電感。(圖片來源:EPC)
圖 1:EPC23102 包含控制邏輯、位準移位器、閘極驅動器,以及採用半橋拓撲的 GaN 輸出 FET (左側)。晶片封裝 (右側) 經過最佳化,可達到高散熱與低寄生電感。(圖片來源:EPC)
較少廢熱與較低 EMR
EPC23102 輸出電晶體具備 5.2 mΩ 的典型汲極源極導通電阻 (RDS(on)) (25°C 下)。這些電晶體可處理高達 100 V 的電壓,以及最高 35 A 的電流。此外,GaN 裝置採用橫向結構,且無本質本體二極體,因此產生的閘極電荷 (QG) 和逆向復原電荷 (QRR) 極低。
相較於具備類似 RDS(on) 的 MOSFET 裝置,GaN 驅動器的切換損耗減少最多五倍,因此可讓 GaN 架構逆變器在相對較高的脈寬調變 (PWM) 頻率下運作 (最高 3 MHz),且失效時間更短 (不到 50 ns)。
GaN 半導體具有高切換速度 (dV/dt) 和低溫係數,更採用具有降低寄生電感的風裝設計,可將訊號失真降至最低,進而將 EMR 和切換損耗降至最低。如此一來,就不需要採取濾波策略,也可使用更小的低成本電容與電感,進而節省電路板空間。
除了低接觸電阻 RDS(on) 外,GaN 裝置還具備諸如 GaN 基板高熱傳導率,以及元件封裝的較大熱接觸面積等其他優勢,因此 GaN 功率級無需散熱片即可切換最大 15 A 的電流 (圖 2)。
") 圖 2:在 25.5°C 環境溫度與不同 PWM 頻率下,GaN 功率級的溫升與相位電流關係。(圖片來源:EPC)
圖 2:在 25.5°C 環境溫度與不同 PWM 頻率下,GaN 功率級的溫升與相位電流關係。(圖片來源:EPC)
EPC23102 的低側至高側通道還具有強大的位準轉換器,可在軟切換與硬切換條件下運作 (甚至在大量負向端子電壓下),並可避免由快速 dV/dt 暫態引起的誤觸,包括源自外部來源或相鄰相位的暫態。內部電路整合了邏輯與自舉功率電荷與停用功能。防護功能可在電源電壓過低,甚至是故障時,避免意外開啟輸出 FET。
現成可用的馬達逆變器評估套件
要開始使用 GaN 技術的三相 BLDC 馬達,最輕鬆快速的方是就是採用 EPC 的 EPC9176KIT 馬達逆變器評估套件。此評估套件包含 EPC9176 馬達逆變器板與 DSP 控制板。此外還隨附可透過客戶特定主機控制器操控的簡易型 EPC9147E 控制器插拔式配接器。耦合連接器可傳輸下列訊號:3 個 PWM、2 個編碼器、3 個 Uphase、3 個 Iphase、UDC、IDC,以及 2 個狀態 LED。
EPC9176 馬達逆變器板屬於公版設計,有助於促成內部電路設計,而 EPC9147A 控制板在搭配 Microchip Technology 的 motorBench 開發環境後,就可讓使用者快速架設和運作,無需耗費時間寫程式或編程。
三相 BLDC 馬達逆變器整合了三個 EPC23102 GaN 半橋驅動器,可控制 AC 或 DC 馬達以及 DC/DC 電力轉換器。在最大 6.6 mΩ 的 RDS(on) 環境下,以 100 V 切換電壓恆定運作時,功率級在處於 28 A 峰值 (Apk) 負載電流或 20 A rms (ARMS) 下產生的熱損耗極少。EPC23102 專為多相位 DC/DC 轉換而配置,支援最高 500 kHz 以及 250 kHz (針對馬達驅動應用) 的 PWM 切換頻率。
EPC9176 馬達逆變器板尺寸為 8.1 × 7.5 cm,包含支援完整馬達逆變器所需的一切關鍵功能電路,包括 DC 匯流排電容、閘極驅動器、穩壓輔助電壓、相位電壓、相位電流和溫度量測,以及適用於每個相位的保護功能與選配的諧波或 EMR 濾波器 (圖 3)。
") 圖 3:EPC9176 馬達逆變器配備 DC 匯流排電容、閘極驅動器、穩壓器、電壓感測、電流與溫度保護功能,以及 EMR 濾波器。(圖片來源:EPC)
圖 3:EPC9176 馬達逆變器配備 DC 匯流排電容、閘極驅動器、穩壓器、電壓感測、電流與溫度保護功能,以及 EMR 濾波器。(圖片來源:EPC)
三相 GaN 逆變器可在 14 至 65 V DC 的輸入電壓下運作,並可在無過衝的情況下切換,能產生順暢扭力並將運作雜訊降至最低。此電路板針經過最佳化,能讓 GaN 典型高速切換斜率達到低於 10 V/ns,並可選擇性地降低,以操作 DC/DC 轉換器。此外還可連接以不同電壓位準運作的兩個轉子位置感測器 (霍爾感測器)。
無振動扭力與低運作雜訊
透過三相 BLDC 馬達的實作範例,展示失效時間參數化對馬達順暢運作以及雜訊產生的影響。針對 GaN FET 架構的半橋高側與低側 FET 之間的切換過渡,可選擇極短的鎖定時間,這是因為 GaN HEMT 反應極為快速,且不會像速度較慢的 MOSFET 一樣產生寄生過衝。
圖 4 (左側) 顯示在 40 kHz 的 PWM 頻率下,以 500 ns 的典型 MOSFET 失效時間運作的 GaN 逆變器。原本應平滑的正弦相位電流呈現極高失真,進而引發高轉矩漣波與對應雜訊。在圖 4 (右側) 中,失效時間已縮短至 50 ns,可達到正弦相位電流,能讓馬達順暢運作且僅有超低雜訊。
") 圖 4:典型的 MOSFET 在 40 kHz PWM 頻率下的失效時間為 500 ns (左側),會導致相位電流產生高失真,引發高轉矩漣波與高雜訊位準。失效時間為 50 ns (右側) 時,會產生正弦相位電流,能讓馬達在低雜訊狀態下順暢運轉。(圖片來源:EPC)
圖 4:典型的 MOSFET 在 40 kHz PWM 頻率下的失效時間為 500 ns (左側),會導致相位電流產生高失真,引發高轉矩漣波與高雜訊位準。失效時間為 50 ns (右側) 時,會產生正弦相位電流,能讓馬達在低雜訊狀態下順暢運轉。(圖片來源:EPC)
降低相位電流的漣波也意味著定子線圈的磁化損耗會降低,而相位電壓漣波降低,就可產生更高的解析度,並可更加精確地控制扭力和速度,尤其是用於類似設計的低電感值馬達。
針對需要更大功率的馬達驅動應用,有兩款 GaN 逆變器板可使用:EPC9167HCKIT (1 kW) 與 EPC9167KIT (500 W)。兩款皆採用 EPC2065 GaN FET,最大 RDS(on) 為 3.6 mΩ,最大裝置電壓為 80 V。EPC9167 電路板針對每個切換位置採用單一 FET,EPC9167HC 則具備兩個可同時運作的 FET,可提供最大 42 Apk (30 ARMS) 的輸出電流。EPC2065 GaN FET 針對馬達控制應用支援最高 250 kHz 的 PWM 切換頻率,針對 DC/DC 轉換器則支援最高 500 kHz。
EPC9173KIT 逆變器板可提供更高的功率,最高 1.5 kW。此電路板構成了兩個單通道 EPC23101ENGRT GaN 閘極驅動器 IC 的半橋分支,兩個閘極驅動器 IC 僅具有一個整合式高側功率 FET。此電路板可擴充為降壓、升壓、半橋、全橋或 LLC 轉換器,提供高達 50 Apk (35 ARMS) 的輸出電流,在適當散熱下,能以最高 250 kHz 的 PWM 切換頻率運作。
只要數分鐘時間即可讓驅動級完成設定並運作
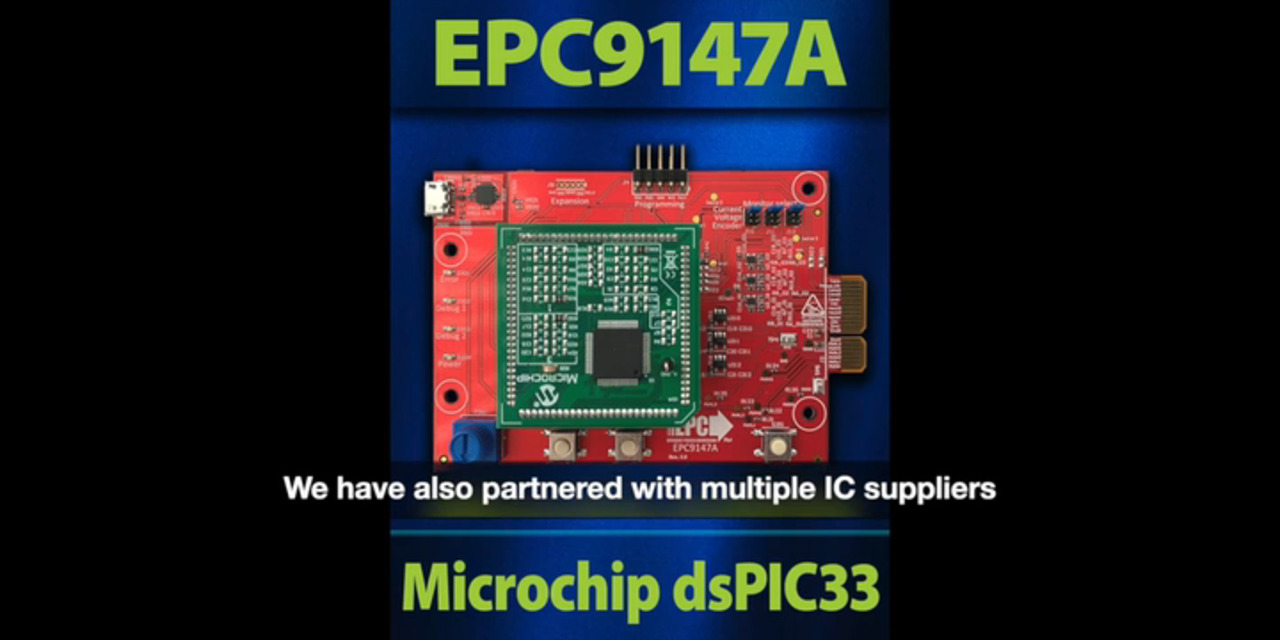
若要在不編寫程式碼的情況下評估 EPC9176 GaN 逆變器板,最快速的方式即是採用 EPC9147A 控制器介面板。MA330031-2 插入式模組 (PIM) 包含 Microchip Technology 推出的 dsPIC33EP256MC506-I-PT 16 位元 DSP (圖 5)。
") 圖 5:EPC9147A 通用控制器介面卡可搭配多種插入式模組,例如 16 位元 dsPIC33EP256 DSP 架構的 MA330031-2 PIM。(圖片來源: EPC/Microchip Technology)
圖 5:EPC9147A 通用控制器介面卡可搭配多種插入式模組,例如 16 位元 dsPIC33EP256 DSP 架構的 MA330031-2 PIM。(圖片來源: EPC/Microchip Technology)
為了促進 DSP 控制器介面運作,設計人員可採用 motorBench 開發套件,並添加以下項目:
- MPLAB X IDE_V5.45 與建議更新
- 程式碼配置工具外掛程式 (DSP 特定編譯)
- motorBench 外掛程式 2.35 (馬達範例)
為方便探討,此範例採用 EPC9146 GaN 馬達逆變器板:
- 以名為「sample-mb-33ep256mc506-mclv2.X」的 EPC914xKIT 開始展開 MCLV-2 或 EPC 專案
使用者可輕鬆挑選 EPC9146 GaN 馬達逆變器板用的範例 HEX 檔案,並使用編程配接器 (如用於 16 位元微控制器的 Microchip Technology PG164100) 將其寫入 DSP dsPIC33EP256MC506。隨後可透過無感測器 FOC 模式下的控制和操作功能,手動控制連接的 BLDC 馬達 (Teknic_M-3411P-LN-08D)。
若馬達運作狀況不理想,或是需要針對不同的運作狀態進行配置,motorBench 也提供可配置的範例檔,但必須在刷寫前進行編譯。如上所述,對 GaN 馬達驅動器來說,有個相當基本但很重要的參數,就是 50 ns 或更短的失效時間,在編譯 HEX 檔案前務必檢查此參數。
BLDC 馬達的自訂參數
為了針對採用 motorBench IDE 的無感測器 FOC 操作配置客製化 BLDC 馬達設定,使用者可測量其特定馬達參數,並在組態檔中輸入相關值。例如可在此將 ISL Products International 的 MOT-I-81542-A 馬達當作測試馬達使用。在 24 V 工作電壓下的功耗為 361 W,每分鐘轉速為 6100 轉 (rpm)。
必須先決定以下四個參數:
- 歐姆電阻:可透過三用電表在定子線圈端子之間測量
- 電感:透過三用電表在定子線圈端子之間測量
- 極對:為了決定極對,設計人員必須將兩個相位設為短路,並將第三個相位保持開路,手動計算一次軸運轉的閂鎖數,然後再將其結果除以二
- 反電動勢 (BEMF):使用示波器在定子線圈端子之間測量 BEMF。為了進行測量,設計人員必須:
- 夾住兩條相位引線的探針,並將第三條保持開路
- 手動轉動馬達軸,並記錄電壓回應
- 測量最大正弦半波的峰對峰電壓 App 與週期 Thalf 值 (圖 6)。
") 圖 6:BEMF 的決定方法是測量最大正弦半波的峰對峰電壓 App 與週期 Thalf 值。(圖片來源:EPC)
圖 6:BEMF 的決定方法是測量最大正弦半波的峰對峰電壓 App 與週期 Thalf 值。(圖片來源:EPC)
Microchip 參照以上專案範例,針對 Teknic M-3411P-LN-08D 馬達決定下列參數 (8.4 ARMS、八極、扭力 = 1 Nm,以及 244 W 功率額定值):
- App = 15.836 Vpp
- Thalf = 13.92 ms
- 極對:pp = 4
- 接著,Microchip 會使用方程式 1 計算 BEMF 常數 (針對 1000 rpm = 1 krpm):
") 方程式 1
方程式 1
 針對此範例馬達
針對此範例馬達
(針對 motorBench 使用的值為 10.2)
- RL-L = 800 mΩ 線間電阻,減去 LCR 儀表引線產生的 100 mΩ
- 在本範例中測量值為 932 µH,但使用 Ld = Lq = 1 mH
在 motorBench 子選單「設定/PMSM 馬達」中,輸入決定的參數。設計人員只要使用類似馬達類型的 XML 組態檔,即可執行此工作。或者也可將參數輸入到新建立的 (空白) 組態檔中,接著再透過「匯入馬達」按鈕進行匯入。
結論
GaN 馬達驅動器能以電池供電的 BLDC 馬達驅動達到高效率效能,而且尺寸小巧,重量輕盈。可整合到馬達外罩中,不僅受到完善保護,更可簡化裝置設計與安裝作業,並減少維護需求。
透過參考電路、預編程模型視 DSP 控制器和馬達開發環境的支援,BLDC 馬達應用的設計人員和程式設計師,可縮短電路設計時間,更專注在應用開發工作上。
聲明:各作者及/或論壇參與者於本網站所發表之意見、理念和觀點,概不反映 DigiKey 的意見、理念和觀點,亦非 DigiKey 的正式原則。